新潟県工業技術総合研究所は、工業系の技術支援機関です。
| Topページ > 技術支援 > 下越技術支援センターホームページ > ばら積み部品のピッキングシステム |
そこで、ディープラーニングや画像処理ライブラリなど無料のソフトを使い、中小企業でも導入しやすいピッキングシステムの開発に取り組みました。既存のシステムでは難しかった、薄くて空洞のある部品もピッキングできるようになりました。
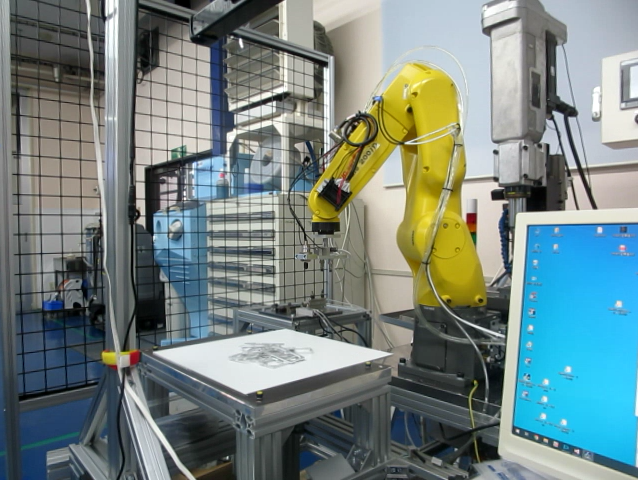
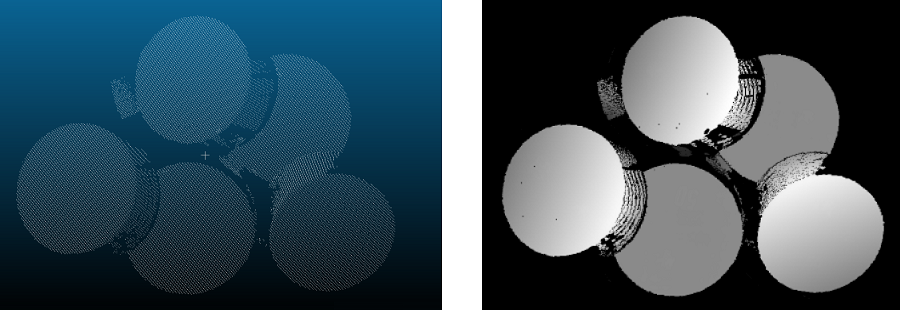
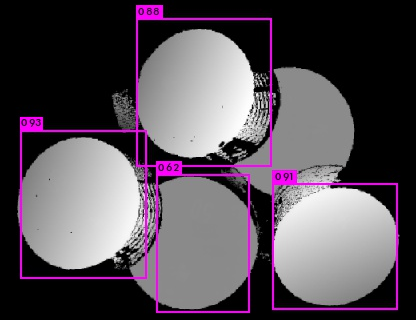
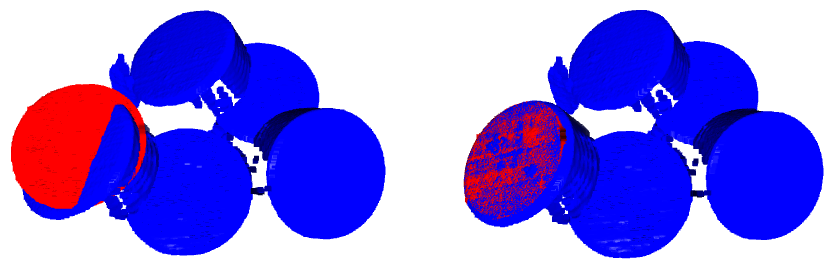
ここで使用した一般物体検出とは画像中の複数の物体の位置とその物体が何かを同時に検出するもので、部品のおおよその位置推定に使用します。また、ICPは点群の張り合わせを繰り返し計算で行うもので、部品の位置と傾きを精度よく計算することができます。 ピッキングのプログラムは、ディープラーニング、ICP、画像処理ライブラリOpenCV等、無料のツールを使い開発しました。本システムを外注するとハードとソフトで1,000万円近くかかりますが、ここではソフトウェアを自作し半分以下のコストで実現しました。部品が金属でなく、かつある程度大きい時は、より安価な3次元センサが使える可能性があり、この場合はさらにコストが下がります。
|
問い合わせ:新潟県工業技術総合研究所 中越技術支援センター 大野 宏 TEL:0258-46-3700 FAX:0258-46-6900 (令和3年2月26日) |