新潟県工業技術総合研究所は、工業系の技術支援機関です。
| Topページ > センシング技術の農業応用 > トマトの茎径センサ |
今回は事例紹介(その3)「トマト栽培ほ場で様々なセンサのデータ収集」で使用した茎径センサについて紹介します。
そこで今回は茎以外の物が写らないようにするための治具を3Dプリンタで試作しました。図3は治具の写真で、USB接写カメラの取付口と茎の背景板で構成されています。 さらに枯れ枝や薬剤などが背景板につかないよう、背景板を升のような形にするなどの改良を加えながら実験を繰り返しています。図4は改良した治具で計測している風景です。
 図1 トマトの茎の撮影風景 |
 図2 茎の撮影画像 |
 図3 茎撮像用の試作治具 |
 図4 試作治具を用いた計測風景 |
この色空間上に破線のような閾値を設けて、背景板の色とそれ以外の色(茎の色)を分けました。 背景板は白色なので、Sが小さく、Lが大きい閾値に設定しました。
画像処理の結果を図6に示します。右の写真は閾値で分けた背景板の色を黒く、それ以外の色を白く塗りつぶした画像です。 最後に白い部分の幅を数箇所計測し、その平均から茎径を算出しました。
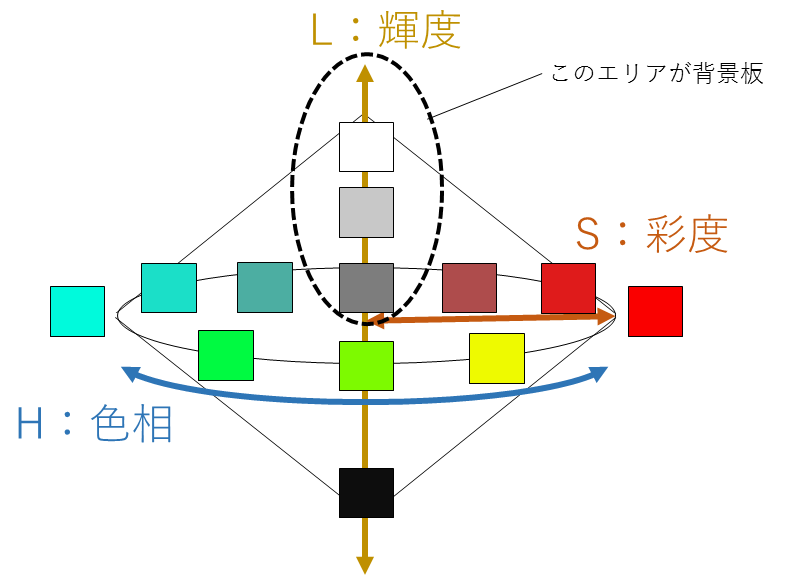 図5 HSL色空間と閾値 |
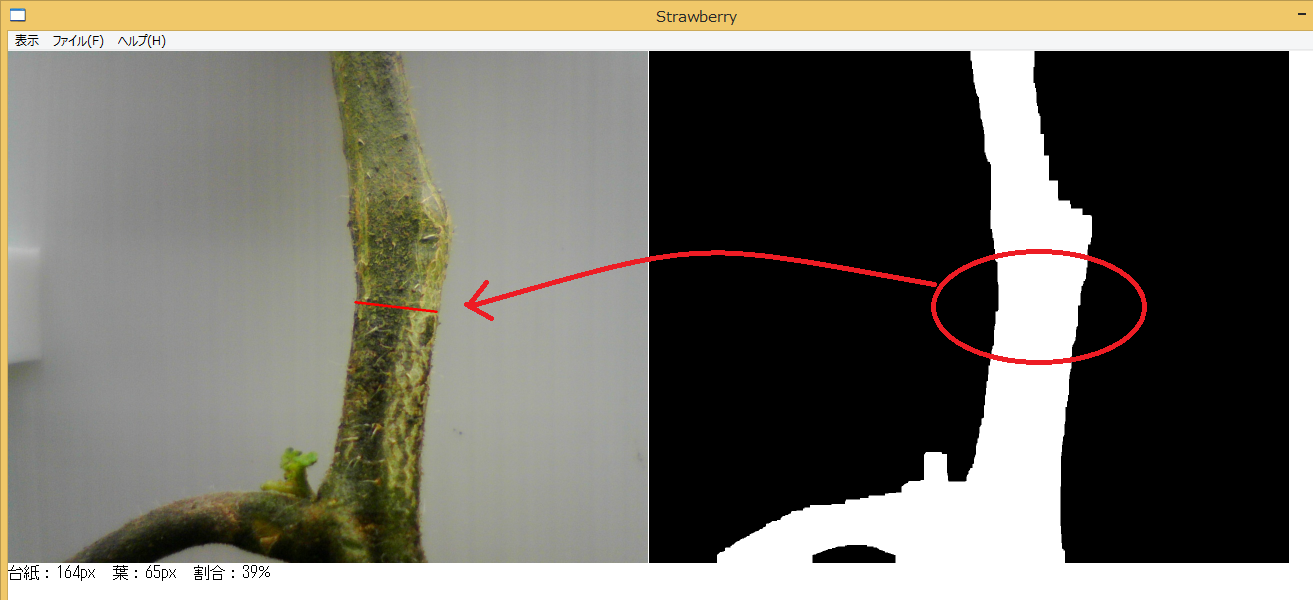 図6 茎の画像処理と茎径算出(左:処理前画像、右:画像処理結果) |
グラフの矢印の部分で茎径の値が大きく変動していますが、これは茎に虫が付いていたことが原因でした(図8)。 このような場合でも正しい茎径を算出できるような改良を今後も検討したいと思います。
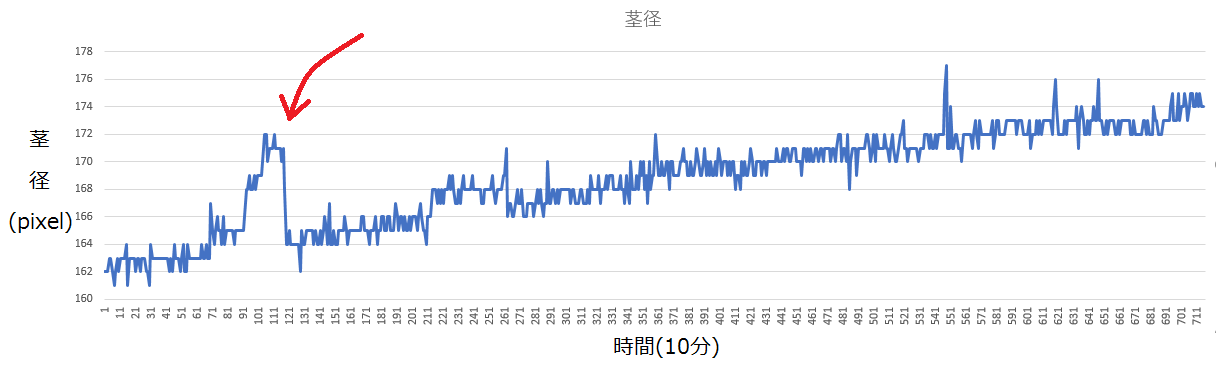 図7 茎径の計測結果 |
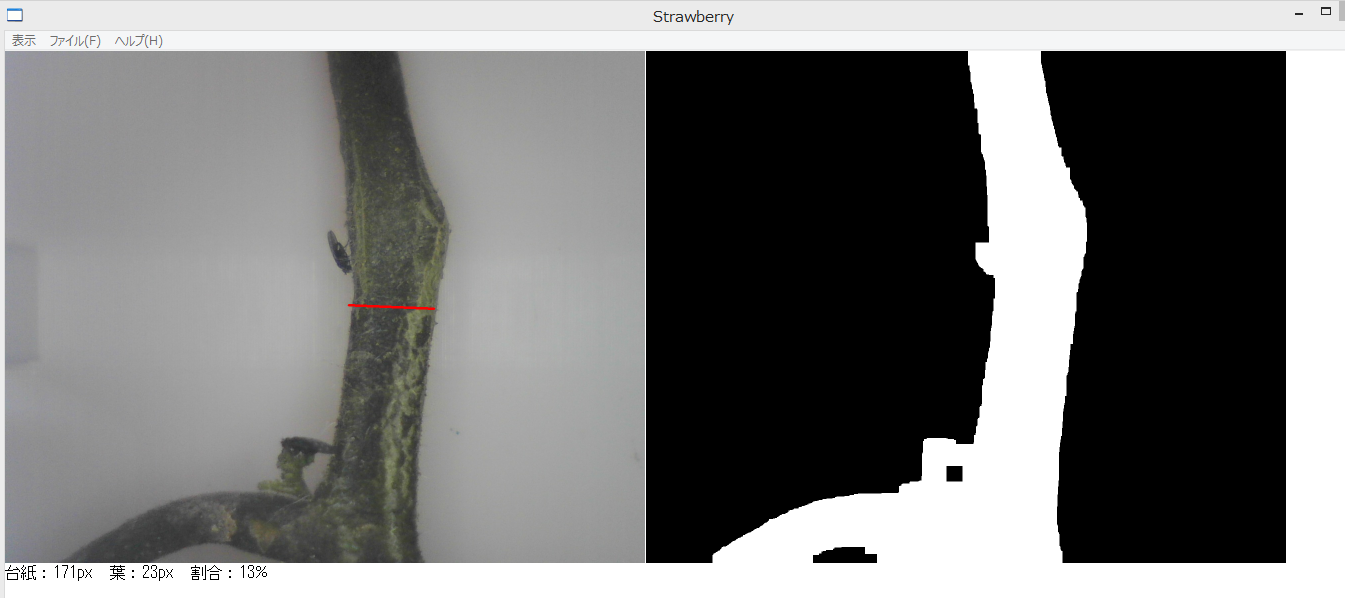 図8 茎径が大きく計測された部分の画像(左:虫がいる茎の画像、右:画像処理結果) |
画像から茎だけを抽出する方法として、ステレオカメラによる3D計測やディープラーニングによる認識などが考えられますが、PCの処理能力と画像処理のバランスを検討しながら今後も改良を進めて行きます。
| 問い合わせ:新潟県工業技術総合研究所 企画管理室 主任研究員 木嶋 祐太 |